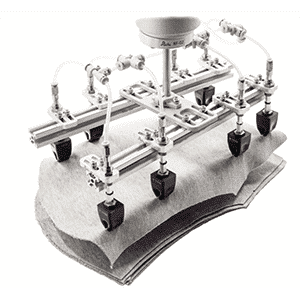
Egnet til pick & place af bløde åndbare tekstiler og stoflag. De er i stand til kun at gribe det øverste lag fra en bunke.
Modsat den stive struktur på en traditionel griber, er soft griberen fleksibel med bløde pneumatiske “fingre”. Soft griberen kan gribe emnet uden forud justering uanset størrelse og form. Fingrene åbner og griber ved positivt tryk eller vakuumflow. Gribekraften kontrolleres ved at justere lufttrykket.
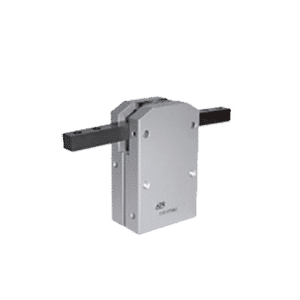
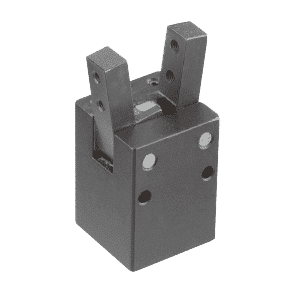
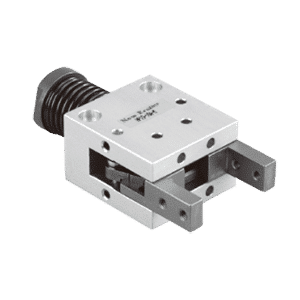
Fingerdelen af kæben er lavet af fleksibelt materiale og selve gribehandlingen ligner et menneskes fingre, der forsigtigt kan gribe emnet uden at påføre det skade. Fingrene fås i forskellige størrelser og længder.
Download produktark